专项 人体的运动常考图(提升练)-北师大版七年级下册同步练(初中生物)
2025-02-24
|
2份
|
11页
|
146人阅读
|
0人下载
资源信息
| 学段 | 初中 |
|---|---|
| 学科 | 生物学 |
| 教材版本 | 初中生物学北师大版七年级下册 |
| 年级 | 七年级 |
| 章节 | 第11章 人体的运动 |
| 类型 | 作业-同步练 |
| 知识点 | - |
| 使用场景 | 同步教学-新授课 |
| 学年 | 2025-2026 |
| 地区(省份) | 全国 |
| 地区(市) | - |
| 地区(区县) | - |
| 文件格式 | ZIP |
| 文件大小 | 583 KB |
| 发布时间 | 2025-02-24 |
| 更新时间 | 2025-02-24 |
| 作者 | xy08626 |
| 品牌系列 | 其它·其它 |
| 审核时间 | 2025-02-24 |
| 下载链接 | https://m.zxxk.com/soft/50618798.html |
| 价格 | 3.00储值(1储值=1元) |
| 来源 | 学科网 |
内容正文:
1 / 5
专项 人体的运动常考图
1.【答案】A
【分析】图中所示结构名称:①关节头,④关节窝,两者构成关节面,②关节囊,③关节腔,
⑤关节软骨。
【详解】A.关节由②关节囊,③关节腔和关节面组成,关节面包括①关节头,④关节窝,故
A错误。
B.⑤关节腔内有关节囊分泌的滑液,可润滑⑤关节软骨,使关节更灵活,故 B正确。
C.②关节囊包裹着关节,使关节更牢固,②损伤后会影响关节的牢固性,故 C正确。
D.关节的运动需要骨骼肌的牵拉,故 D正确。
故选 A。
2.【答案】B
【分析】图中①关节头,②关节囊,③关节腔,④关节窝,⑤关节软骨。
【详解】A.骨连结包括不活动骨连结、半活动的骨连结和活动的骨连结,活动的骨连结也叫
关节,是骨连结的主要形式,因此关节是指骨与骨之间能够活动的骨连结,故 A正确。
B.图中②是关节囊,关节囊由结缔组织构成,包绕着整个关节,把相邻的两骨牢固地联系起
来。而关节软骨是指⑤,它覆盖在关节头和关节窝的表面,可减少运动时两骨间关节面的摩擦
和缓冲运动时的震动,故 B错误。
C.③是关节腔,关节腔是由关节囊和关节面共同围成的密闭腔隙,内有少量滑液。滑液有润
滑关节软骨的作用,可以减少骨与骨之间的摩擦,使关节的运动更加灵活自如,故 C正确。
D.①是关节头,④是关节窝,脱臼是指关节头从关节窝中滑脱出来的现象,通常是由于关节
受到过度的外力或运动不当等原因引起的,脱臼会导致关节疼痛、肿胀、活动受限等症状,故
D正确。
故选 B。
3.【答案】A
【分析】关节置换是通过植入假体改善关节活动度并缓解疼痛,已成为治疗某些骨性关节炎的
有效方法之一。
【详解】A.通常,植入的假体替换的是关节的关节头和关节窝。结合题图可知,图中的“置
换部分”为关节头,故 A符合题意。
2 / 5
B.关节囊是包裹在关节面周围的结缔组织囊,它起到连接、固定和保护关节的作用。在人工
髋关节置换手术中,通常不会直接置换关节囊,而是保留或修复原有的关节囊结构,故 B不符
合题意。
C.关节腔是由关节软骨和关节囊围成的狭窄间隙,内含少量滑液,有助于减少关节运动时的
摩擦。在人工髋关节置换中,关节腔本身并不被置换,故 C不符合题意。
D.关节窝是关节面的另一部分,通常呈凹陷状,与相邻骨的关节头相配合,形成关节的稳定
部分。由图可知,置换的是关节头,故 D不符合题意。
故选 A。
4.【答案】C
【分析】图中,①骨膜,②骨密质,③骨髓腔。
【详解】A.①骨膜是紧密贴附在骨表面的一层致密结蹄组织膜,骨膜内含有神经和血管分布,
起营养骨质的作用,神经还有感觉的作用;骨膜内还有成骨细胞,成骨细胞可以产生新的骨质,
与骨的长粗和骨的愈合有关,因此①是骨膜,内层的成骨细胞与骨折后的骨的修复有关,A正
确。
B.②骨密质是骨质的一种,它排列紧密,质地坚硬,主要分布于骨干,对长骨起到支持和承
重的作用,B正确。
C.③骨髓腔中和骨松质内都有红骨髓,红骨髓具有造血功能。胎儿和婴幼儿的骨髓都是红骨
髓,具有造血的功能。成年以后,长骨骨干内的红骨髓逐渐被脂肪组织代替,称为黄骨髓,失
去造血功能。但当人体大量失血时,骨髓腔里的黄骨髓还可以转化为红骨髓,恢复造血的功能,
C错误。
D.人体长骨两端的骺端软骨层细胞能不断分裂产生新的骨细胞,使骨不断长长,直至骨骺愈
合,骨的生长才停止,D正确。
故选 C。
5.【答案】A
【分析】图中①骨密质,②软骨层,③成骨细胞,④骨髓。
【详解】A.图中①表示骨的外周部分,其为骨密质且质地坚固,主要提供支撑和保护,故 A
正确。
B.②为图中的内软骨层,其与长骨的长度生长有关,与骨长粗无关,故 B错误。
C.③表示成骨细胞,具有再生功能,对骨折后骨的愈合起作用,它还能不断产生新的骨细胞
使骨不断长粗,故 C错误。
3 / 5
D.④代表的是幼年时的红骨髓,具有造血功能,故 D错误。
故选 A。
6.【答案】B
【分析】人体运动是由骨骼肌受神经传来的刺激收缩时,牵动骨绕关节活动而产生。屈肘时肱
二头肌收缩,肱三头肌舒张;伸肘时肱二头肌舒张,肱三头肌收缩。此模型中,1、2 模拟两
块骨,5模拟关节,3模拟肱三头肌,4模拟肱二头肌。
【详解】A.图中 1 和 2为长方形木板,其形状和在模型中的作用与人体的骨类似,相当于两
块骨,故 A正确。
B.人在完成伸肘动作时,肱二头肌舒张,肱三头肌收缩。在此模型中,4 相当于肱二头肌,
应处于舒张状态,3 相当于肱三头肌,应处于收缩状态,而不是 3、4 都处于收缩状态,故 B
错误。
C.在人体中,肌肉的两端是分别附着在不同的骨上的。在这个模型中,图中 3的两端分别连
在相邻的两片长木板上,很好地模拟了肌肉在人体中的这种连接方式,故 C正确。
D.由题干可知,4相当于肱二头肌,在屈肘动作中发挥收缩作用,故 D正确。
故选 B。
7.【答案】D
【分析】人体完成一个运动都要有神经系统的调节,由骨、骨骼肌、关节的共同参与,多组肌
肉的协调作用,才能完成。
【详解】人或动物任何一个动作的产生,都不是一块骨骼肌收缩、舒张完成的,而是多组肌群
在神经系统的调节下,骨、关节和肌肉的协调配合完成的;骨骼肌接受神经传来的刺激,会收
缩,牵引着它所附着的骨,绕着关节运动,从而产生各种动作。在运动中,神经系统起调节作
用,骨起杠杆的作用,关节起支点作用,骨骼肌收缩起动力作用。而不是关节绕着骨完成的,
ABC 符合题意,D符合题意。
故选 D。
8.【答案】D
【分析】骨骼肌有受刺激而收缩的特性,当骨骼肌受神经传来的刺激收缩时,就会牵动骨绕关
节活动,于是躯体就会产生运动。图中①肱二头肌,②肱三头肌,a无弹性的绳子代表肌腱,
b螺丝代表关节,c木块代表骨。
【详解】A.骨骼肌包括肌腹和肌腱,肌腹是骨骼肌中间较粗的部分,受刺激而收缩;肌腱是
骨骼肌两端较细的部分,跨关节附在不同的骨上,有固定作用;图中 a无弹性的绳子在气球的
4 / 5
两端,代表骨骼肌的肌腱,①气球代表肌腹,故 A正确。
B.b螺丝固定两块木块,代表关节;c木块较坚硬,代表骨,故 B正确。
C.骨骼肌一般要跨越一个或几个关节,由 a无弹性的绳子代表肌腱附着在相邻的骨上,因此,
每个气球两端的绳子固定在至少两块木块上,故 C正确。
D.骨骼肌有受刺激而收缩的特性,当骨骼肌受神经传来的刺激收缩时,就会牵动着它所附着
的骨,绕着关节活动,于是躯体就产生了运动。但骨骼肌只能收缩牵拉骨而不能将骨推开,因
此一个动作的完成总是由两组肌肉相互配合活动,屈肘时,①肱二头肌收缩,②肱三头肌舒张,
故 D错误。
故选 D。
9.【答案】(1) 骨骼肌 线粒体 (2) 舒张 神经(或 神经和内分泌) ②
(3) 关节头 (4) 学习/后天性
【分析】人体的运动系统由骨、关节和骨骼肌组成。关节由关节面(关节头和关节窝)、关节
囊和关节腔组成。动物的行为从获得的途径来看,分为先天性行为和学习行为(后天性行为)。
图乙中的①是肌腹、②是肌腱。
【详解】(1)人体在运动中,骨起杠杆作用,关节起支点作用,骨骼肌收缩产生动力。因此,
在完成慢跑动作时,提供动力的结构是骨骼肌。呼吸作用的场所是线粒体,所以在运动中,肌
肉细胞的线粒体内进行呼吸作用,为运动提供能量。
(2)骨骼肌有受刺激而收缩的特性,当骨骼肌受神经传来的刺激收缩时,就会牵动着它所附
着的骨,绕着关节转动,于是躯体就产生了运动,完成一个动作,至少需要两组肌肉相互协调
配合。跑步过程中屈膝时,股四头肌舒张,腘绳肌收缩,而伸膝则相反。 运动并不是仅靠运
动系统来完成,它需要神经(或 神经和内分泌)系统的调节和控制,它需要能量的供应,因
此还需要消化系统、呼吸系统、循环系统等系统的配合。股四头肌是由①肌腹和②肌腱组成,
肌腹是骨骼肌中间较粗的部分,受刺激而收缩;肌腱是骨骼肌两端较细的部分,跨过关节附在
不同的骨上,有固定作用。
(3)关节面包括关节头和关节窝,运动前如果没有充分热身,易出现韧带拉伤或脱臼的情况。
脱臼是指关节头从关节窝中脱落出来的现象。
(4)听到课间操广播提示,学生有主动赶到操场集合的行为,从行为获得的途径来看,这种
行为是在遗传因素的基础上,通过环境因素的作用,由生活经验和学习而获得的行为,属于学
习行为(后天性行为)。
10.【答案】(1) 乙 ① (2) 收缩 舒张 (3) 轴承 神经
5 / 5
【分析】图一可知,气动人工肌肉 B表示肱二头肌,气动人工肌肉 A表示肱三头肌,轻质梠材
表示骨,轴承表示关节。图二可知,①骨、②骨骼肌,③关节。
【详解】(1)人体能产生运动,是因为骨骼肌受到神经传来的刺激而收缩,再牵动骨绕着关节
活动,骨起杠杆作用,关节起支点作用,骨骼肌收缩产生动力。骨骼肌由肌腹和肌腱组成,肌
腱由结缔组织构成,同一块骨骼肌的两端跨过关节分别固定在两块不同的骨上。因此,兴趣小
组在设计该机器人的手臂时,依据的是图二中乙所示的结构模式;图一中的轻质铝材相当于模
拟图二中的①骨。
(2)骨骼肌有受刺激而收缩的特性,但骨骼肌只能收缩牵拉骨而不能将骨推开,一个动作的
完成总是由至少两组肌肉相互配合活动,共同完成的。屈肘时,肱二头肌收缩,肱三头肌舒张;
伸肘时,肱三头肌收缩,肱二头肌舒张。当乒乓球飞来时,监控摄像头将信息传到中央控制系
统,中央控制系统控制气动人工肌肉 B进行收缩,另一个气动人工肌肉 A进行舒张,这样“智
能机器人”的机械手臂屈肘,完成接球动作。
(3)人体能产生运动,是因为骨骼肌受到神经传来的刺激而收缩,再牵动骨绕着关节活动,
骨起杠杆作用,关节起支点作用,骨骼肌收缩产生动力。因此,图一中,组成“智能机器人”
机械手臂的轻质铝材之所以能灵活转动,主要是依靠轴承起到支点作用,以及两个气动人工肌
肉的收缩和舒张提供动力。该机器人能准确地判断来球,是依靠中央控制系统的分析和处理,
其作用相当于人体的神经系统。
1 / 6
专项 人体的运动常考图
关节结构图
识图分析
技巧应用
1.(24-25 八年级上·河北保定·期末)如图为关节的结构模式图,下列有关说法错误的是
( )
A.③④⑤共同组成了关节 B.③内有滑液,可润滑⑤,使关节更加灵活
C.②损伤后会影响关节的牢固性 D.关节的活动需要骨骼肌的参与
1.关节结构图 3.肌肉牵拉骨运动模型图
2.骨的结构图
技巧:熟记关节的组成及各个结构和功能
分析:① 关节头 ② 关节囊 ③ 关节腔 ④ 关节窝 ⑤ 关节软骨
模块导航
2 / 6
2.(24-25 八年级上·陕西汉中·期末)如图表示关节结构示意图,下列相关叙述错误的是
( )
A.关节是指骨与骨之间能够活动的骨连结 B.②是关节软骨,覆盖在关节表面
C.③中的滑液能减少骨与骨之间的摩擦 D.脱臼是指①从④中脱出的现象
3.(24-25 八年级上·江苏泰州·期末)下图是人工髋关节中的置换部分,由图可知,置换部
分属于关节的( )
A.关节头 B.关节囊 C.关节腔 D.关节窝
骨的结构图
识图分析
技巧:熟记关节的组成及各个结构和功能
骨的基本结构由骨膜、骨质和骨髓组成
骨质:骨密质和骨松质
分析:① 骨松质 ② 骨膜 ③ 骨髓 ④ 骨密质
技巧应用
4.(24-25 八年级上·四川成都·期末)人体各处骨的形态、大小有所不同,但主要结构和功
3 / 6
能却是基本相同的。如图是人长骨的结构示意图,下列分析错误的是( )
A.①是骨膜,内层的成骨细胞与骨折后的修复有关
B.②是骨密质,它与长骨的支持和承重的功能有关
C.③处的红骨髓,成年后被脂肪取代而失去造血功能
D.人体长骨两端的骺端软骨层细胞与骨的长长有关
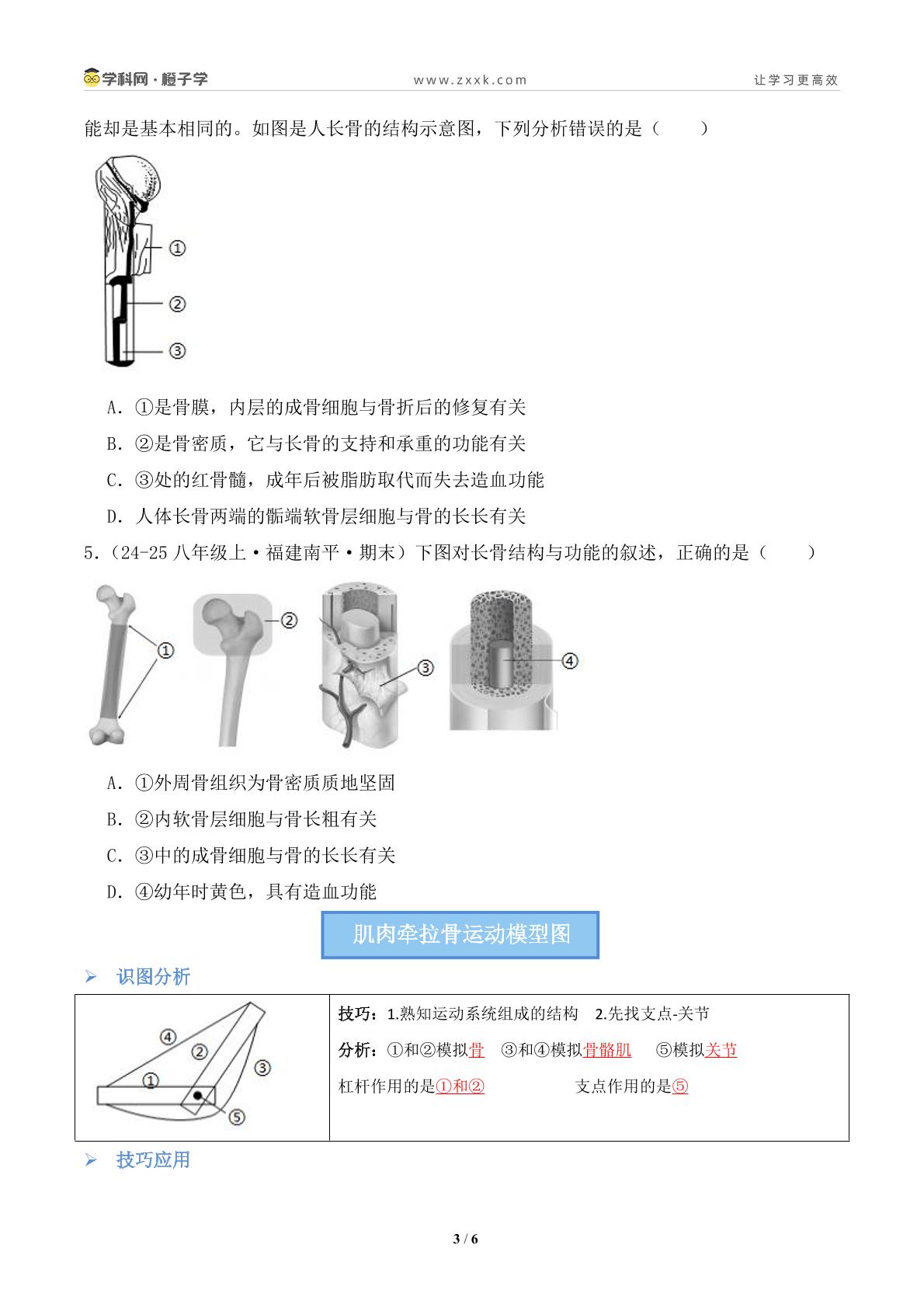
5.(24-25 八年级上·福建南平·期末)下图对长骨结构与功能的叙述,正确的是( )
A.①外周骨组织为骨密质质地坚固
B.②内软骨层细胞与骨长粗有关
C.③中的成骨细胞与骨的长长有关
D.④幼年时黄色,具有造血功能
肌肉牵拉骨运动模型图
识图分析
技巧:1.熟知运动系统组成的结构 2.先找支点-关节
分析:①和②模拟骨 ③和④模拟骨骼肌 ⑤模拟关节
杠杆作用的是①和② 支点作用的是⑤
技巧应用
4 / 6
6.(24-25 八年级上·北京大兴·期末)如图是某同学用两片长方形的木板(1和 2)、两条橡
皮筋(3和 4)、一颗螺丝(5)制作的肌肉牵拉骨运动的模型。下列相关叙述错误的是( )
A.1和 2相当于两块骨
B.人在完成伸肘动作时,图中 3和 4都处于收缩状态
C.3的两端分别连在相邻的两片长木板上
D.在伸肘动作中 4可以模拟肱二头肌
7.(2024·云南楚雄·模拟预测)杠杆原理是由古希腊科学家阿基米德在《论平面图形的平衡》
一书中最早提出的,在人体的运动也涉及此原理的运用。下列有关人体运动的说法中,不合理
的是( )
A.运动中,骨起到了杠杆的作用
B.运动中,关节起到了支点的作用
C.运动中,骨骼肌起到了动力的作用
D.运动是由人体的骨骼肌牵动关节,绕着骨完成的
8.(2024·河南南阳·一模)如图是某生物兴趣小组制作的人体手臂模型,不同材料模拟人体
运动系统中的不同结构,其中①②分别模拟不同的骨骼肌。下列相关叙述不正确的是( )
组成模型的各部分 材料 模拟的结构
5 / 6
气球 肌腹
无弹性的绳子 a
螺丝 b
木块 c
A.①肱二头肌由肌腹和结构 a两部分组成
B.结构 b表示的是关节,结构 c表示的是骨
C.同一块骨骼肌两端的结构 a可连在不同的骨上
D.做屈肘动作时,②肱三头肌处于收缩的状态
9.(24-25 八年级上·湖南株洲·期末)某校课间操组织学生慢跑。慢跑是一项中等强度的有
氧运动,主要通过运动、呼吸、循环、神经等系统协调完成。请据图回答:
(1)在完成慢跑动作时,提供动力的结构是 。外界的氧气通过呼吸系统和循环系统进入
该结构内的细胞中,在细胞的 内进行呼吸作用,从而获取能量支撑慢跑运动。
(2)慢跑过程屈膝(如图乙)时,股四头肌处于 (填“收缩”或“舒张”)状态。此过
程主要是靠 系统的调节来完成。股四头肌是由肌腹和 (填序号)组成。
(3)慢跑之前,学校会让学生缓慢活动踝关节和膝关节,避免运动时出现韧带拉伤或脱臼的情
况。脱臼是指 从关节窝中脱落出来的现象。
(4)听到课间操广播提示,学生有主动赶到操场集合的行为。从行为获得的途径来看,这种行
为属于 (填“先天性”或“学习”)行为。
10.(24-25 八年级上·湖南永州·期末)2023 年 12 月,成都国际乒联混合团体世界杯在成都
市武侯区隆重举行,精彩纷呈的比赛让人目不暇接。受此启发,某兴趣小组设计了一个能与人
对打的“智能机器人”模型(如图一所示);图二是人体手臂的骨、关节和骨骼肌的结构示意
图。请据图分析回答:
6 / 6
(1)兴趣小组在设计该机器人的手臂时,依据的是图二中, (填“甲”或“乙”)所示
的结构模式;图一中的轻质铝材相当于图二中的 (填标号)。
(2)当乒乓球飞来时,监控摄像头将信息传到中央控制系统,中央控制系统控制气动人工肌肉
B (填“收缩”或“舒张”),气动人工肌肉 A (填“收缩”或“舒张”),这样
“智能机器人”的机械手臂屈肘,完成接球动作。
(3)图一中,组成“智能机器人”机械手臂的轻质铝材之所以能灵活转动,主要是依靠起支点
作用的 ,以及两个气动人工肌肉的收缩和舒张提供了动力;该机器人能准确地判断
来球,依靠的是中央控制系统的分析和处理,其作用相当于人体的 系统。
资源预览图

1

2
3

相关资源
由于学科网是一个信息分享及获取的平台,不确保部分用户上传资料的 来源及知识产权归属。如您发现相关资料侵犯您的合法权益,请联系学科网,我们核实后将及时进行处理。