2026年辽宁省铁岭市铁岭县中考二模物理试题
 切换试卷
切换试卷
2026-05-19
|
8页
|
95人阅读
|
21人下载
资源信息
| 学段 | 初中 |
|---|---|
| 学科 | 物理 |
| 教材版本 | - |
| 年级 | 九年级 |
| 章节 | - |
| 类型 | 试卷 |
| 知识点 | - |
| 使用场景 | 中考复习-二模 |
| 学年 | 2026-2027 |
| 地区(省份) | 辽宁省 |
| 地区(市) | 铁岭市 |
| 地区(区县) | 铁岭县 |
| 文件格式 | |
| 文件大小 | 11.46 MB |
| 发布时间 | 2026-05-19 |
| 更新时间 | 2026-05-19 |
| 作者 | 匿名 |
| 品牌系列 | - |
| 审核时间 | 2026-05-19 |
| 下载链接 | https://m.zxxk.com/soft/57935173.html |
| 价格 | 0.50储值(1储值=1元) |
| 来源 | 学科网 |
内容正文:
2026年铁岭县中考模拟考试
物理试卷(二)
(本试卷共24道题满分80分
物理和化学考试时间共150钟)
考生注意:请在答题卡各题目规定答题区域内作答,答在本试卷上无效。
一、选择题(本题共9小题,每小题2分,共18分。在每小题给出的四个选项中,第1~6题
只有一项符合题目要求,选对的得2分;第7~9题有多项符合题目要求,全部选对的
得2分,选对但不全的得1分,有选错的项得0分)
1.制造手机芯片主要使用的核心材料是()
A.铁
B.镍铬
C.硅
D.银
2.如图所示,汽车领域广泛利用(人工智能)语音助手实现“人
与车”全场景自然交互,下列说法正确的是(
)
A.根据用户语音指令完成指定操作,说明声音可以传递信息
B.请语音助手将音量调低,实质是降低声音的音调
C.在行驶过程中,AI语音助手关闭车内其他声音,是在人耳
处控制了噪声
D.当AI语音助手云端处理来自司机的语音指令时,声音信号
会被转换成电信号进行传输,这一过程并不涉及电磁波
3.“香炉初上日,瀑水喷成虹”描述了如图所示情景:太阳刚升
起时从瀑布溅起的水雾中可看到彩虹。此现象主要属于()
A.光的直线传播
B.光的色散
C.光的反射
D.小孔成像
4.水豆腐因其含水量高而得名,白嫩的水豆腐既是营养丰富的豆制品又是一种地方特色小
吃。水豆腐的生产过程主要是先将泡过的大豆加水磨制成豆浆,再将豆浆加热沸腾后加
入凝固剂固化成含有大量水分的凝胶体,即水豆腐。关于水豆腐的说法正确的是(
A.给豆浆加热是利用热传递改变了豆浆的内能
B.水豆腐吃起来烫嘴是因为水豆腐蕴含的热量大
C.豆浆加入凝固剂固化成水豆腐是凝固过程
D.沸腾的豆浆上方的“白气”是空气液化形成的小水滴
5.春满华夏。万物复苏,冰雪消融。冰雪消融发生的物态变化是(
A.液化
B.凝固
C.凝华
D.熔化
6.如图所示,甲乙两个相同的容器分别盛有体积
杯子
相同的水和盐水,静置在水平面上。现将一杯
术块
子和木块以两种方式分别放在甲乙两容器中,
容器
甲中杯子静止时漂浮在水面上,乙中木块紧贴
777777777777
甲
乙
第1页
共8页
杯底(杯中无气体)并与杯子一起悬浮在盐水中,则说法中正确的是()
A.甲容器对水平面的压强大于乙容器对水平面的压强
B.木块在甲容器中受到的浮力大于在乙容器中受到的浮力
C.甲容器中液面上升的高度大于乙容器中液面上升的高度
D.将乙容器中的杯子轻轻向下推动少许,杯子和木块将沉到容器底
7.近些年来我国在深空探索和深海探测等领域取得了重大成就,实现了毛主席在《水调歌
头·重上井冈山》中所描绘的“可上九天揽月,可下五洋捉鳖”的情景。如图所示,对
下列科技成就所涉及的物理知识分析正确的是()
甲
乙
丙
A.图甲:中国“天宫空间站”绕地球旋转,是因为其受到惯性力的作用
B.图乙:国产C919大型客机起飞爬升过程中,机翼下方空气流速较小,压强较大
C.图丙:“奋斗者”号载人潜水器下潜的深度越深,所受海水的压强越大
D.图丁:当航空母舰上的舰载机飞离后,航空母舰所受的浮力不变
8.“人工智能+”成为新质生产力引擎。如图所示的新型智能笔,无需连接数据线即可将
获取的信息传输到手机或电脑上,并处理成文本及语音形式。下列有关信息、·能源及材
料的说法正确的是()
A.智能笔和手机、电脑之间通过电磁波传递信息
B.手机长时间使用会发热,主要是由于电流的热效应
C.太阳能电池板可将太阳能转化为电能
D.电脑使用的能源是一次能源
9.每年进入汛期,多地会发生强降雨,导致河流水位上涨。某校科技小组设计了一个监测
水位的装置如图甲所示。电源电压不变,R为定值电阻,R是竖直放置的电阻装置(最
大阻值402),浮子可带动金属滑杆AP竖直上下移动,起到滑动变阻器的作用。当电压
表的示数达到某一数值时,提醒小组成员水位达到警戒值(25Cm)。R接入电路的阻值
R随水位的变化关系如图乙所示,与之对应的电压表与电流表示数变化关系如图丙所示。
则下列说法正确的是(
R/
U
40
2
10
25.30水位/cm
警戒水位
0.1
0.3/A
甲
丙
A.电路工作时的总功率最小值为0.4W
B.水位变化过程中,当R=R时水位为20Cm
C.水位达到警戒值时,电压表示数为4V
D.想降低水的警戒值,可适当地增大R
第2页
共8页
二、填空题(本题共6小题,每空1分,共12分)
《哪吒之魔童闹海》是中国影史首部票房破100亿的电影,登顶全球动画电影票房榜。
电影中,哪吒脚踏风火轮追击海怪,他们越来越近,假设哪吒3min内匀速飞行了18km,
则他飞行的平均速度是
km/h:以海怪为参照物,哪吒是
的。
11.如图所示,是五彩祝福鸡蛋。在鸡蛋着色的过程中,
火龙果、橙子、紫甘蓝等果蔬中的天然食用色素进入
鸡蛋内部的现象,在物理学中叫做
,温度
越
,色素进入越快。
12.如图所示,2025年11月25日,神舟二
十二号飞船发射圆满成功!运载火箭用液
态氢作为燃料,则是因为液态氢具有较高
的
(选填“热值”或“比热容”):
当飞船返回地球的过程中,外壳与大气层
剧烈摩擦而升温,此过程中能量的转化与
四冲程内燃机的
冲程相似。
13.如图所示,利用静电喷漆枪给物件上漆,
喷漆枪
小液滴因为带
(选填“同种”
物件
或“异种”)电荷,所以相互排斥;但会
被带正电的物件吸引,那么小液滴带有
(选填“正”或“负”)电荷。
小液滴
14.雨滴在竖直下落的过程中,由于受到重力和阻力的作用,一般要经历加速和匀速两个
阶段,最终落到地面。如果一滴雨滴所受的重力为5X10N,它在某时刻所受的阻力为
3×10N,此时雨滴所受力的合力是
N,方向是
的。
15.小明有一个不吸水的工艺品,底座为质地均匀的柱形木块A,木块上粘有合金块B。他
将工艺品竖直放在水中(如图甲),静止时木块浸入水中的深度为;按图乙竖直放置,
静止时木块浸入水中的深度为h2,工艺品所受浮力与甲图相比
(选填“变大”
“变小”或“不变”);因黏合处松开导致合金块沉底,若不计黏合材料的影响,合金的
密度为水的n倍,当木块在水中竖直静止时浸入的深度h
(用h、h、n
表示)。
甲
第3页
共8页
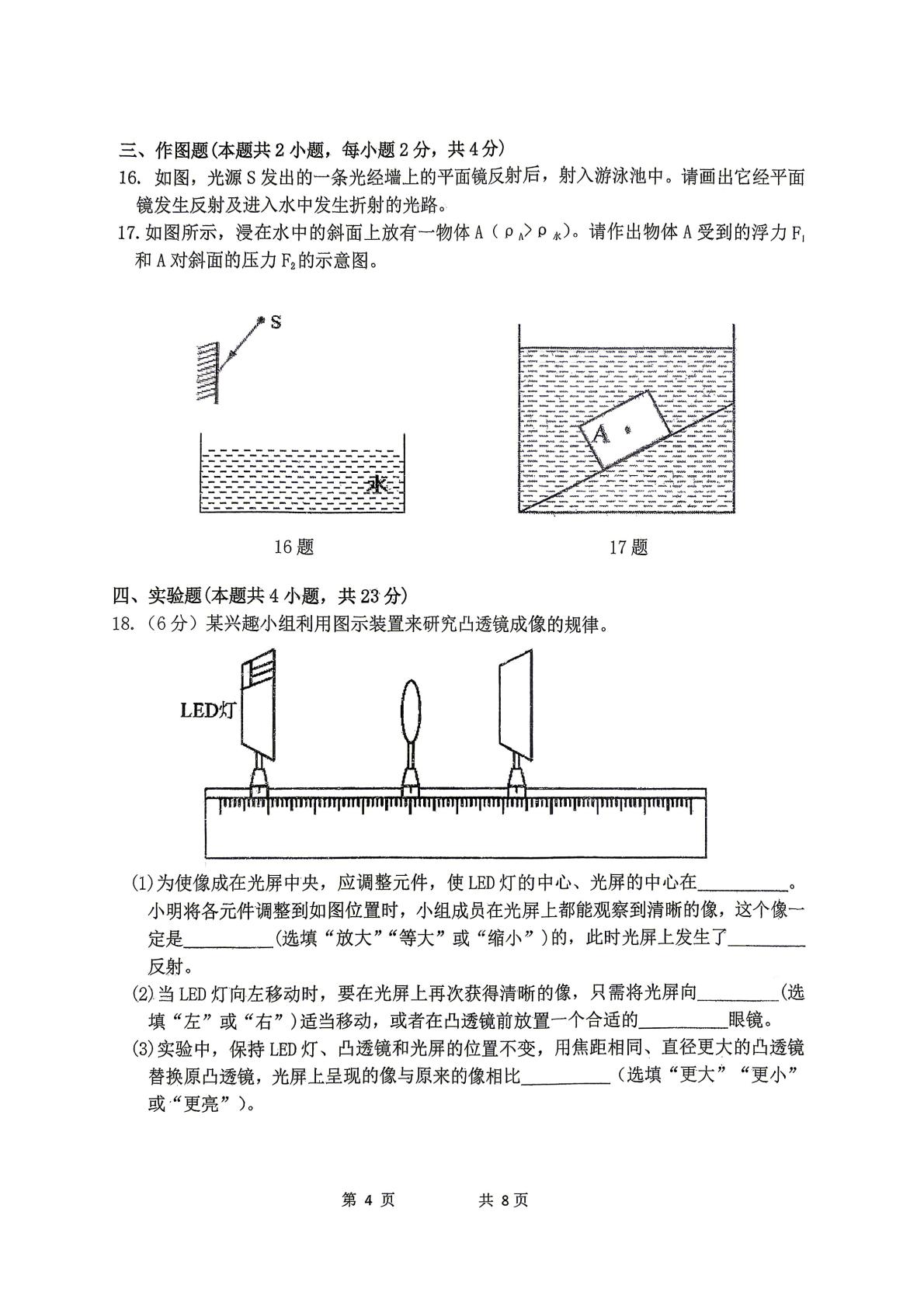
三、作图题(本题共2小题,每小题2分,共4分)
16.如图,光源S发出的一条光经墙上的平面镜反射后,射入游泳池中。请画出它经平面
镜发生反射及进入水中发生折射的光路。
17.如图所示,浸在水中的斜面上放有一物体A(P)pk)。请作出物体A受到的浮力F,
和A对斜面的压力F2的示意图。
S
16题
17题
四、实验题(本题共4小题,共23分)》
18.(6分)某兴趣小组利用图示装置来研究凸透镜成像的规律。
LED灯
T中mpimmpompri本Tmm可
(1)为使像成在光屏中央,应调整元件,使LD灯的中心、光屏的中心在
0
小明将各元件调整到如图位置时,小组成员在光屏上都能观察到清晰的像,这个像一
定是
(选填“放大”“等大”或“缩小”)的,此时光屏上发生了
反射。
(2)当LD灯向左移动时,要在光屏上再次获得清晰的像,只需将光屏向
(选
填“左”或“右”)适当移动,或者在凸透镜前放置一个合适的
眼镜。
(3)实验中,保持LD灯、凸透镜和光屏的位置不变,用焦距相同、直径更大的凸透镜
替换原凸透镜,光屏上呈现的像与原来的像相比
(选填“更大”“更小”
或“更亮”)。
第4页
共8页
19.(5分)如图是小明在做
C
“观察水的沸腾”实验时,
.100
用到的器材有铁架台、烧
杯、温度计、秒表、硬纸
碘锤
90
板、陶士网等。
B
、
实验时用温度计测出不
同时刻水的温度,并记录
在表中,其中某次温度计
甲
丙
的示数如图乙所示,示数为
℃。
21
(2某时刻他观察到烧杯中有大量气泡产生,气泡内应该是
(选填“空气”、
“水蒸气”或“小水珠”),同时看到有“白气”不断从烧杯中冒出,这些“白气”
属于
(填写物态变化名称)现象;水沸腾后继续加热,温度计的示数将
(选填“变大“变小”或“不变“)。
(3)小明又将碘锤放入热水中,如图丙所示,观察到碘锤中固态碘逐渐消失,紫色的
碘蒸气充满碘锤。在此实验中,固态碘没有先变成液体,再变成气体,其原因是
(已知碘的熔点是113.5℃,碘的沸点是184.4℃)。
20.(5分)实验小组的同学想自制一个“力与密度综合测量仪”,实验器材有:铁架台、
贴有白纸的木板、弹簧、钩码、做有标记的小桶、刻度尺、水。制作原理:弹性限度
内,弹簧伸长的长度与所受拉力成正比。
(一)制作测力计
伸长长度/cm
控力/N
冬
丙
(1)如图甲,首先把贴有白纸的木板悬挂在铁架台上,在木板前方挂一个弹簧,让弹
簧自由伸长,选取弹簧上合适的一点作为参考点,在白纸左侧记录该点的位置,作
为弹簧测力计的零刻度点;
(2)如图乙,在弹簧下悬挂一个重为1N的钩码,此时弹簧被拉伸2cm,记下参考点的
位置即为1N对应的刻度位置;
(3)所提供弹簧能承受的最大拉力略人于5N,因此弹簧测力计的测量范围应设为0~
5N,5N刻度线的位置应标在距零刻度点
_cm的位置。再将0~5N之间的
刻度线等分50份,即可完成刻度线的标注。
(二)制作密度计
(1)如图丙,将小桶挂在弹簧下,弹簧在小桶的拉力下伸长,依然选取弹簧上相同的
参考点作为密度计的零刻度点;
第5页
共8页
(2)在小桶中加入水至标记处,记下弹簧参考点的位置,此处即为1g/cm对应的刻度
位置。通过分析,若在小桶中装入相同体积、密度为0.8gcm的液体,则液体质
量为同体积水的
倍,这样即可完成密度计的刻度线的标注;
(3)小组同学分析,为了使测力计与密度计的零刻度点的位置一致,只需对制作测力
计的操作进行适当改进即可,请你写出改进的方法
(4)改进后若想使测力计中1N的刻度与密度计中1g/cm的刻度位置相同,小桶中每
次装入液体的体积都应为
cm';
(5)若想提高密度计的测量精确度应选择图丁中的
弹簧。
21.(7分)探究“电流与电阻的关系”时,实验器材有:学生电源、电流表、电压表、滑
动变阻器(标有“2002A”字样)、定值电阻5个(52、102、152、202、502)、
开关一个、导线若干。
A
0.6
0
0,2
0.1
0'0t520R2
甲
(1)请用笔画线代替导线将图甲中的实物图连接完整,要求:滑片P向右移动时电压
表示数变大,导线不交叉。
(2)连接好电路,将电源电压调至4.5V,滑动变阻器阻值调到最大,闭合开关S,移
动滑片P,发现电流表无示数,电压表示数始终接近电源电压,导致这一现象的原
因可能是
(填序号)。
A.滑动变阻器断路
B.定值电阻R断路
C.定值电阻R短路
(3)排除故障后利用前四个定值电阻进行实验,图乙是根据实验数据得到的I-R图像:
①其中阴影部分面积表示的物理量是
其值为
②由实验图像可得出结论:在电压一定时,
(4)实验时更换为502的定值电阻后,无论怎样移动滑动变阻器的滑片都不能使电压
表示数达到原来的数值,为了能完成这次实验,下列措施可行的是
(填
序号)。
A.调高电源电压
B.将电压表改接到滑动变阻器两端
C.在电源和开关之间串联一个152的电阻
(5)实验结束后,该小组用电压表和一个已知最大阻值为R的滑动变阻器,测量未知
电阻R,的阻值。他们设计了如图丙所示电路图,实验操作如下:
①将滑动变阻器滑片P移到最右端,闭合开关S,此时电压表的示数为U;
②将滑动变阻器滑片P移到最左端,此时电压表的示数为U2;
③则R=
(用R、U、U2表示)。
第6页
共8页
五、综合应用题(本题共3小题,共23分)
22.(8分)2024年11月13日,在珠海航展兵器馆亮相的“机器狼”受到观众喜爱,成
为名副其实的明星展品。如图所示,若机器狼的质量为20kg,每只脚与地面的接触面
积是20cm,在水平地面上匀速行走时受到阻力是总重的0.2倍,某次展示时,机器狼
以10.8km/h的速度匀速前进30秒到达预定地点后四足站立对周围进行侦查,g=10N/kg。
求:
定家发
(1)这次展示机器狼移动的距离是多少?
(2)机器狼站立侦查时对地面的压强是多少?
(3)机器狼水平匀速前进过程的功率是多少?
23.(8分)如图是某新型电炖锅的内部简化电路图,由工作电路和控制电路两部分组成。
它能够先用高温挡将食物加热,达到一定温度时,控制电路开关会自动改变为低温挡缓
慢加热,直至沸腾,这有利于锁住食物营养成分。工作电路中电源电压为220V,R2
387.22,R、R2均为加热电阻;控制电路中的电源电压U=24V,热敏电阻R,作为感应
器探测锅内的汤温,其阻值随温度变化的关系如图乙所示,R为滑动变阻器。.闭合开关
S,当锅内的汤温达到一定温度时,电磁铁产生的吸引力把衔铁吸下转入低温加热。求:
(1)电炖锅煮饭时,利用了电流的热效应,当锅内汤的温度为60℃时,控制电路中的
电流为0.1A,求此时R的阻值为多大?(不计电磁继电器线圈的电阻)
(2)若电炖锅低温挡的功率为100W,则电炖锅R,的阻值及高温挡位的功率各是多少?
(3)电炖锅把质量为2kg,20℃的汤加热25min时,控制电路开关自动改变功率,求锅
内温度为多少℃时,电炖锅自动改为保温?[电炖锅的效率为80%,c海=4.0×103J/
(kg℃)]
8/o220No
R
软导线
中:/n
弹
电
R2
90
铁
50
30
R
热敏电阻
0204060
t/
第7页
共8页
24.(7分)阅读短文,回答问题。
在2025年央视春晚的舞台上,一组跳舞机器人以其精准的舞步和协调的动作吸引了
RB
观众的目光。
◆RB阻
接
控
制
电
路
磁场强弱
输出
电流
年I/A
电缆
磁敏电阻
转速传感器
齿轮
5101520
t/103s
丙
每个机器人总质量为20kg,机器人在舞台上移动时,可以通过轮子匀速直线运动,
也可以通过关节的电机实现复杂的舞蹈动作。机器人利用磁敏电阻等器件来监控移动速
度,控制驱动电机运转,如图甲所示为控制电机运转的原理电路,U为输入电压,R为
定值电阻,R为磁敏电阻,阻值随外加磁场强弱的变化而改变(如图乙)。
下表为机器人的部分参数,“电池比能量”为单位质量的电池所能输出的电能;“减
速器的减速比”为输入转速与输出转速的比值。
电池的质量
10kg
减速器的减速比
30:
1
电池比能量
150wh/kg
驱动电机的输入总功率
500W
移动速度
0.1~1m/s
驱动电机将电能转化为机械能的效率
60%
(1)为提高机器人的稳定性,机器人的重心应
选填“偏上”或“偏下”);
(2)机器人以最大速度沿水平路面匀速直线运动10s,运动的距离是
m,此
过程中机器人受到的阻力为
N;如果机器人在跳舞过程中突然跳起,跳
离地面高度为0.1m后落地,则这一过程中重力对机器人所做的功为
_J;
(3)控制电机运转的磁敏电阻阻值随磁场强弱变化的图线如图乙所示,当磁敏电阻在
正常工作区时,即使图甲电路中输入电压U发生改变,R两端电压U,都能维持在某
一定值附近微小变化,从而使控制电路中的电机稳定转动,则磁敏电阻的正常工作
区对应图中
段;
(4)如图丙所示为机器人测速系统的部分装置简化图,磁敏电阻转速传感器安装在驱
动电机旋转齿轮的外侧,当传感器对准齿轮两齿间隙时,电缆输出电流为0。某次
当驱动电机的齿轮匀速转动时,电缆输出如图丁所示周期性变化的电流,则1s内
对准传感器的齿间隙共有
个;若此时机器人遇到障碍物,减速器启动,
则经减速器降速后的齿轮转速为
转/分。
第8页
共8页
资源预览图

1

2

3
4
相关资源
由于学科网是一个信息分享及获取的平台,不确保部分用户上传资料的 来源及知识产权归属。如您发现相关资料侵犯您的合法权益,请联系学科网,我们核实后将及时进行处理。