2026届广西部分学校高三下学期物理适应性训练(一)
 切换试卷
切换试卷
2026-04-29
|
10页
|
342人阅读
|
6人下载
资源信息
| 学段 | 高中 |
|---|---|
| 学科 | 物理 |
| 教材版本 | - |
| 年级 | 高三 |
| 章节 | - |
| 类型 | 试卷 |
| 知识点 | - |
| 使用场景 | 高考复习-模拟预测 |
| 学年 | 2026-2027 |
| 地区(省份) | 广西壮族自治区 |
| 地区(市) | 南宁市,柳州市,桂林市,梧州市,北海市,防城港市,钦州市,贵港市,玉林市,百色市,贺州市,河池市,来宾市,崇左市 |
| 地区(区县) | - |
| 文件格式 | |
| 文件大小 | 8.27 MB |
| 发布时间 | 2026-04-29 |
| 更新时间 | 2026-04-29 |
| 作者 | 匿名 |
| 品牌系列 | - |
| 审核时间 | 2026-04-29 |
| 下载链接 | https://m.zxxk.com/soft/57611757.html |
| 价格 | 1.00储值(1储值=1元) |
| 来源 | 学科网 |
内容正文:
2026届高三物理适应性训练(一)
本训练共100分,时间75分钟.
一、单项选择题:本题共7小题,每小题4分,共28分.在每小题给出的四个选项中,只
有一项是符合题目要求的,
1.利用如图所示的装置研究光电效应,闭合单刀双掷开关S接1时,用频率为少的光
照射光电管,调节滑动变阻器,使电流表的示数刚好为0,此时电压表的示数为U1,
已知电子电荷量为e,普朗克常量为h,下列说法正确的是
A.其他条件不变,增大光强,电压表示数增大
B.改用比更大频率的光照射,调整电流表的示数为零,此时
电压表示数仍为U1
C.其他条件不变,使开关接S接2,电流表示数仍为零
2
D.光电管阴极材料的截止频率,=h-e四
h
2.如图所示,内壁光滑的汽缸内用活塞密封一定量理想气体,汽缸和
活塞均绝热.用电热丝对密封气体加热,并在活塞上施加一外力F,
使气体的热力学温度缓慢增大到初态的2倍,同时其体积缓慢减
电热丝
小.关于此过程,下列说法正确的是
001-
A.外力F保持不变
B.密封气体内能增加
C.密封气体对外做正功
D.密封气体的末态压强是初态的2倍
3.如图所示,水平光滑的地面上固定有半径为R的半圆形轨道,小
球紧贴着半圆形轨道放置,小木块静置在半圆形轨道左侧的水平
地面上,在圆轨道上方同一高度处固定有两个光滑定滑轮,两个
《高三·物理(GX)·训练一》第1页(共8页)
定滑轮分别位于小木块和半圆形轨道圆心的正上方.现用一根跨过两个定滑轮的细
线将小球和小木块连接起来,再对小木块施加水平向左的拉力,将小球沿半圆形轨
道缓慢提高,在小球运动的过程中,下列说法正确的是
A.细线的拉力先增大后减小
B.半圆轨道对小球的支持力先减小后增大
C.小木块对地面的压力逐渐减小
D.适当提高定滑轮的高度可以减小该过程中小球对半圆轨道的压力
4.某同学做引体向上运动,在30s内刚好连续做了10个完整的引体向上.若每次完
整的引体向上分为身体“上引”(身体由静止开始从最低点升到最高点)和“下放”(身
体从最高点回到最低点的初始状态)两个过程,单杠在整个过程中相对地面静止不
动.如图所示,在单杠和地面之间安装力传感器,图中呈现的是一段时间内力传感器
的示数随时间的变化情况.已知该同学身高1.75m,体重约60kg,“上引”过程重心
上升约0.5m,“上引”和“下放”的时间相同,重力加速度取g=10m/s2.下列说法正
确的是
A.从到t3,该同学先“下放”后“上引”
B.从t到t3,可能显示某“上引”过程力的变化情况
C.在某次“上引”过程克服重力做功的平均功率约为
200W
力传感器
D.“下放”过程,该同学的机械能守恒
5.如图所示,一带电粒子g以一定的初速度进人某点电荷Q产生的电场
中,粒子只受静电力,沿图中弯曲的虚线轨迹先后经过电场中的Q、b两
309
点,其中a点的场强大小为E。,方向与ab连线成30°角;b点的场强大小为
E6,方向与ab连线成60°角.下列说法中正确的是
60°
E
A.点电荷Q带正电
B.粒子g在a点的静电力大于在b点的静电力
C.粒子g在a点的电势能大于在b点的电势能
D.a点的电势低于b点电势
《高三·物理(GX)·圳练一》第2页(共8页)
6.2025年,神舟二十一号航天员乘组人驻中国空间站,成功实现了中国航天史上第7
次“太空会师”神舟二十一号飞船发射后首先进人轨道半径为1的近地停泊圆轨
道,在P点调整速度后进入椭圆过渡轨道;随后在Q点调整速度,最终与轨道半径
为2的圆轨道上的空间站完成对接.则飞船
A.在近地停泊圆轨道和空间站轨道上运行周期之比为
近地停泊圆轨道
:
B.从近地停泊圆轨道变轨至椭圆过渡轨道时,需在P点增大
椭圆过渡轨道
空间站轨道
速度
C.在近地停泊圆轨道P点的向心加速度小于在椭圆过渡轨道P点向心加速度
D.在椭圆过渡轨道上由P点向Q点运动过程中,万有引力做负功,机械能减小
7.如图所示,竖直放置的薄圆筒内壁光滑,在内表面距离底面高为五
小滑英
=1.25m的O点处,给一个质量为m的小滑块沿水平切线方向的
初速度⑦。,小滑块将沿筒内表面旋转滑下.假设滑块下滑过程中表
面与筒内表面紧密贴合,圆简内半径R=元m,重力加速度取g
0
10m/s2:小滑块第一次滑过O点正下方时,恰好经过O1点,且
OO1的距离为0.2m.则下列说法正确的是
A.小滑块的初速度v为1m/s
B.小滑块经过O点的速度大小为2m/s
C.小滑块运动过程中受到的筒壁的支持力不变
D.小滑块最后刚好能从O点正对面的Op点滑离圆筒
二、多项选择题:本题共3小题,每小题6分,共18分.在每小题给出的四个选项中,有
多项符合题目要求.全部选对的得6分,选对但不全的得3分,有选错的得0分,
8.甲、乙两列简谐机械横波在同一均匀介质中沿x轴相
y/cm
甲
向传播,甲波的波速为2m/s.t=0时刻两列波在x=
2m处相遇,波形图如图所示.质点P的平衡位置在x
x/m
=0m处,质点Q的平衡位置在x=2m处,质点R的
平衡位置在x=4m处.下列说法正确的
《高三·物理(GX)·训练一》第3页(共8页)
A.t=0时,质点P与R的运动方向相同
B.乙波的波速是1m/s
C.t=0.5s时,质点P的加速度小于质点R的加速度
D.t=1.5s时,质点Q偏离平衡位置的位移为2cm
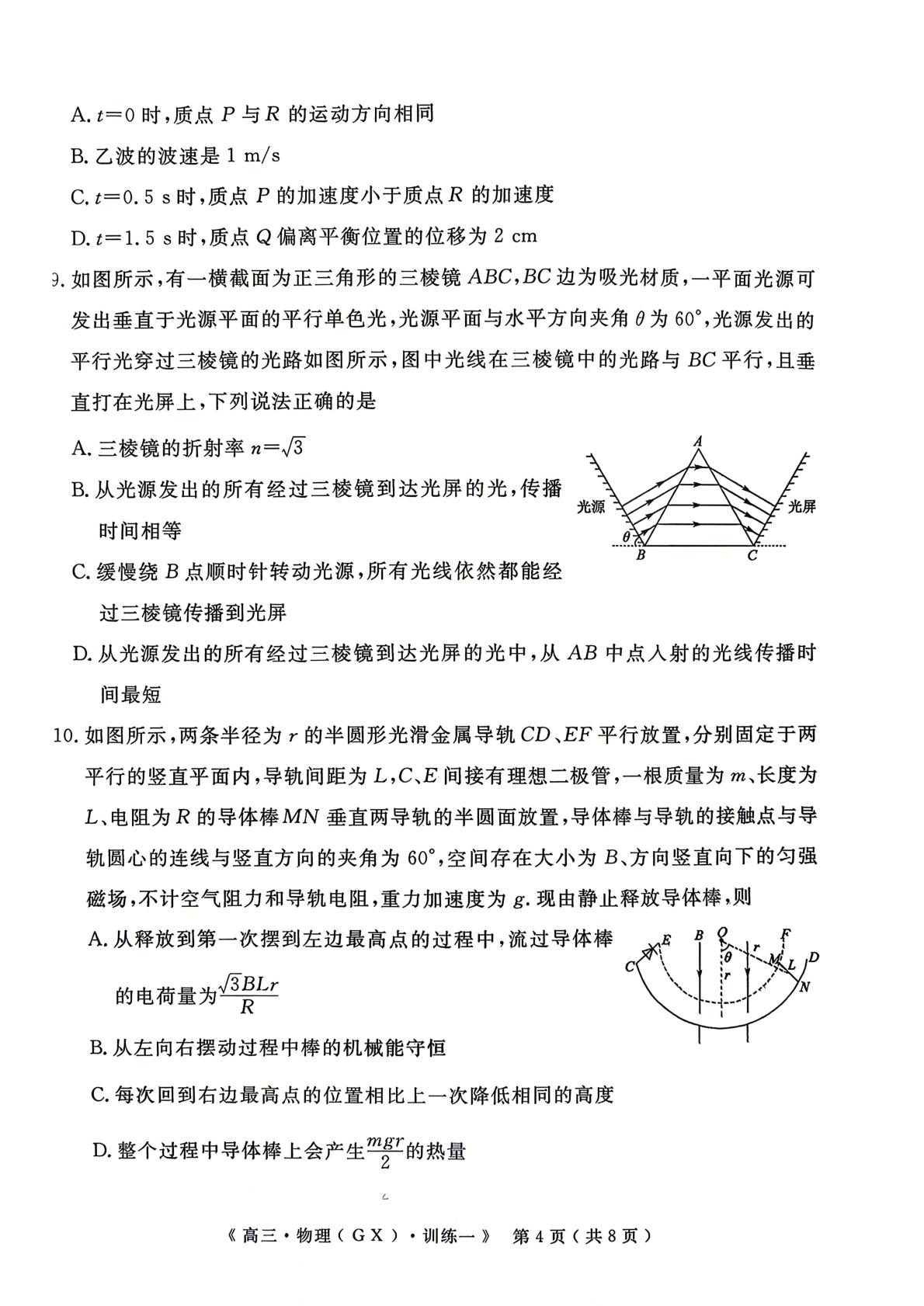
9.如图所示,有一横截面为正三角形的三棱镜ABC,BC边为吸光材质,一平面光源可
发出垂直于光源平面的平行单色光,光源平面与水平方向夹角9为60°,光源发出的
平行光穿过三棱镜的光路如图所示,图中光线在三棱镜中的光路与BC平行,且垂
直打在光屏上,下列说法正确的是
A.三棱镜的折射率n=√3
B.从光源发出的所有经过三棱镜到达光屏的光,传播
光源
时间相等
C.缓慢绕B点顺时针转动光源,所有光线依然都能经
过三棱镜传播到光屏
D.从光源发出的所有经过三棱镜到达光屏的光中,从AB中点人射的光线传播时
间最短
10.如图所示,两条半径为r的半圆形光滑金属导轨CD、EF平行放置,分别固定于两
平行的竖直乎面内,导轨间距为L,C、E间接有理想二极管,一根质量为、长度为
L、电阻为R的导体棒MN垂直两导轨的半圆面放置,导体棒与导轨的接触点与导
轨圆心的连线与竖直方向的夹角为60°,空间存在大小为B、方向竖直向下的匀强
磁场,不计空气阻力和导轨电阻,重力加速度为g.现由静止释放导体棒,则
A.从释放到第一次摆到左边最高点的过程中,流过导体棒
的电荷量为⑧BLr
R
B.从左向右摆动过程中棒的机械能守恒
C.每次回到右边最高点的位置相比上一次降低相同的高度
D.整个过程中导体棒上会产生”的热量
《高三·物理(GX)·训练一》第4页(共8页)
三、非选择题:本题共5小题,共54分.
11.(6分)实验小组的同学利用如图1所示的装置测量当地的重力加速度.
平衡位置处可
安装光电门
图1
图2
(1)同学们在组装单摆时,图1虚线框内你认为最好的悬挂方式是图2中的
(选填“甲”或“乙”)
(2)关于实验中的注意事项,下列说法正确的是
A.小球需选用密度大、体积小的钢球
B.需测出小球完成几十次全振动的总时间,再求出单摆的周期
C.使小球摆动的幅度尽量大一些,这样测量的时间更准确
D.测摆长时应先在水平桌面上将细线拉直测得细线长度,再悬挂小球
(3)将小球向外拉开,使细绳与竖直方向成合适角度后由静止释放,小球下端安装
有一轻质遮光条,在小球下方的遮光条第一次经过最低点开始遮光时进行计
时,测得小球从第1次开始遮光到第n次开始遮光经历的总时间为t,若测得单
摆细线的长度为,小球的直径为D,则当地的重力加速度g=
(用n、
t、L、D表示).
12.(10分)在“测定金属丝电阻率”的实验中:
25
5cm
6
20
(nnn o
15
10
20
甲
(1)用游标卡尺测量金属丝的长度如图甲所示,由图可知其长度=
mm;
用螺旋测微器测得金属丝的直径如图乙所示,则d=
mm,
(2)欲用伏安法测定一段阻值约为5Ω的金属丝的电阻,要求测量结果尽量准确,
现有以下器材:
《高三·物理(GX)·训练一》第5页(共8页)
A.电池组(3V,内阻1)
B.电流表(0~3A,内阻约为0.0125)
C.电流表(0~0.6A,内阻0.5)
D.电压表(0~3V,内阻约为3k)
E.电压表(0~15V,内阻约为15k2)
F.滑动变阻器(0~202,额定电流1A)
G.滑动变阻器(0~20002,额定电流0.3A)
H.开关、导线
上述器材中,电流表应选
,电压表应选
,滑动变阻器应选
(填写各器材的字母代号),
(3)要求待测电阻两端的电压能从零开始变化,请按要求在虚线框中画出实验电路
图.
(4)用电压表和电流表测金属丝的电压和电流时读数如图所示,则电压表的读数为
V,电流表的读数为
A
10
12
i
0
A
(5)该金属丝电阻率的表达式ρ=
(用l,d,R表示).
13.(9分)近年来,我国在人工智能领域取得重大突破,智能机器人技术已广泛应用于
物流、仓储等领域.在某科技公司的测试场上两个物流机器人A和B正在进行性
能测试.如图1所示,在直线测试跑道上,机器人A在t=0时从起点以初速度v40
=2m/s和加速度aa=0.5.m4s2向右匀加速运动;机器人B在t1=4s时从起点
,《高三·物理(GX)·训练一》第6页(共8页)
由静止开始以加速度aB(未知)向右做匀加速运动.已知机器人B在l2=10s时追
上机器人A,求:
B☒→
团→
风+0M
UuB
起点
终点
起点
100米
终点
图1
图2
(1)机器人B的加速度大小aB.
(2)在机器人B追上A之前,两者之间的最大距离.
(3)如图2所示,假设跑道长100米,机器人A以v=4/s的速度从起点匀速向
终点出发;机器人B以vB=8/s的速度从终点匀速向起点出发.两者均在跑
道的终点与起点做折返运动,忽略掉头的时间,则在100秒内机器人A与B会
相遇几次?
14.(13分)如图所示,光滑水平台面MN上放两个相同
)。⊙
小物块A、B,右端N处与水平传送带理想连接,传
送带水平部分长度L=18m,沿逆时针方向以恒定
速度o=2/s匀速转动.物块A、B(大小不计,视作质点)与传送带间的动摩擦因
数均为μ=0.2,物块A、B质量分别为mA=1kg,nB=0.5kg.开始时A、B静止,
A、B间压缩一轻质短弹簧.现解除锁定,弹簧弹开A、B,弹开后B滑上传送带,A
掉落到地面上的Q点,已知水平台面高h=0.8m,Q点与水平台面右端的水平距
离s=1.6m,g取10m/s2,
(1)求物块A脱离弹簧时速度的大小.
(2)求弹簧储存的弹性势能,
(3)求物块B在离开水平传送带时的速度.
《高三·物理(GX)·训练一》第?页(共8页)
15.(16分)如图,一对长平行栅极板水平放置,极板外存在方向垂直纸面向外、磁感应
强度大小为B的匀强磁场,极板与可调电源相连,正极板上O点处的粒子源垂直
极板向上发射速度为vo、带正电的粒子束,单个粒子的质量为m、电荷量为g,一足
够长的挡板OM与正极板成37°倾斜放置,用于吸收打在其上的粒子,C、P是负极
板上的两点,C点位于O点的正上方,P点处放置一粒子靶(忽略靶的大小),用于
接收从上方打入的粒子,CP长度为L。,忽略栅极的电场边缘效应、粒子间的相互
作用及粒子所受重力.sin37°=0.6.
●●●●●●●◆●●●●
(1)若粒子经电场一次加速后正好打在P点处
。。·。。。。。。。。。
的粒子靶上,求可调电源电压U。的大小.
。·G·公····
(2)调整电压的大小,使粒子不能打在挡板OM
+2.9双.
上,求电压的最小值Umin
。。。。·。
M。····
(3)在(1)条件下,连续从O点射入的粒子束,打到P点后均被吸收,吸收后速度为
零,同时探测到粒子靶P点受到粒子束的冲击力为F,求该粒子束的等效电流
强度I.
《高三·物理(GX)·训练一》第8页(共8页)
参芳答案
高三·物理(GX)·训练一·参考答案
7D小滑块水平方向做匀速圆周运动,竖直方向做自由落体运
o
l.D当开关S接1时,由爱因斯坦光电效应方程eJ=hw1
动,则从0点到O1点的时间=√g
L=0.2s,则初速
W。,故其他条件不变时,增大光强,电压表的示数不变,A
错误;若改用比更大频率的光照射时,调整电流表的示
度=2=2ms,A错误:小滑块经过O,点的水平速度
数为零,而金属的逸出功不变,故遏止电压变大,即此时电
为2m/s,因有竖直速度,可知经过O点的速度大于
压表示数大于U1,B错误;其他条件不变时,使开关S接2,
2m/s,B错误:小滑块运动过程中,因水平速度不变,则根
此时hM>W。可发生光电效应,故电流表示数不为零,C错
误;根据爱因斯坦光电效应方程eU=hw,一W。,其中W。=
据=m尺,可知受到的筒壁的支持力大小不变,但方向
,联立解得,光电管阴极材料的截止颜率为4=一少
不断变化,C错误;小滑块运动的总时间为1=√g
2h」
h
D正确,
2B气体湿度升高,体积减小,根据
=C气体压强变大,则外
0.5s,侧转过的周数为一票-2瓷95-2.5圆,可知录
0.4
后刚好能从O,点正对面的Op点滑离圆筒,D正确
力F增加,A错误:气体温度升高,则气体内能变大,即△U
8.AD根据“上下坡”法可以判断出P、Q两点的运动方向都沿y
>0,B正确;气体体积减小,则外界对气体做功,C错误;根
轴正方向,A正确;同一介质中所有波的传播速度是相同
据兴=C热力学温度变为原来的2倍,体积减小,则气体
的,故乙波的波速是2m/s,B错误;根据T=入可得甲波的
压强大于原来的2倍,D错误
周期为T甲=2s,Tz=1s,故t=0.5s时质点P在位移
3.D设小球的重力为G,细线的拉力为T,半圆轨道对小球的支
最大,加速度最大,质点R的处于平衡位置,加速度为0,
持力为F、,连接小球的细线长为L,定滑轮到水平地面的
故质点P的加速度大于质点R的加速度,C错误;t=
高度为H,如图所示,由平衡条件与几何
H
1.5s时,甲波在质点Q处的位移为2cm,乙波在Q处的
关系可得异-会=工,曲于H和R图
位移为0,故质点Q偏离平衡位置的位移为2cm,D正
定,运动过程中L不断减小,所以细线的
确
9.AB根据题意,作出法
拉力不断减小,半圆轨道对小球的支持
线如图所示,由几
力不变,若提高定滑轮的高度,则H变
何关系可得α=
大,运动过程中小球对半圆形轨道的压
60°,B=30°由折射
力减小,AB错误,D正确:运动过程中连
光源
接小木块的细线拉力逐渐减小,细线与竖直方向的夹角不
定律可得n=sing
sing
断增大,所以细线对小木块在竖直方向的拉力不断减少,小
=√5,A正确;根据
B
木块对地面的压力逐渐增加,C错误
题意,设BO的长度为L,三棱镜ABC的每边长为a,由
4.C根据传感器的示数随时间的变化可知,从t1到t3,小明先处
几何关系和对称性可知,光线在三棱镜外传播的距离为
于失重状态后处于超重状态,可知小明先向下加速,后向下
减速,显示了某“下放”过程力的变化情况,AB错误;小明在
√L,在三棱镜内传播的距离为a一L,由公式n=C可
30s内刚好连续做了10个完整的引体向上,“上引”和“下
放”的时间相同,可知均为1.5s,每做一次“上引”过程克服
得,光在三棱镜内传播速度为=友则传播时间为行
重力做的功约为W=Gh=600×0.5J=300J,在某次“上
引过程克服重力胶功的平均功率约刀-?-罂W=
⑧L+a一L-B@可知,从光源发出的所有经过三棱镜到
达光屏的光的传播时间相等,B正确,D错误;缓慢绕B
200W,C正确;“下放”过程,先向下加速后向下减速,向下
点顺时针转动光源,结合上述分析可知,光线在AB面的
减速时重力势能减小,动能减小,机械能减小,D错误.
入射角逐渐减小,则光线在AB面的折射角逐渐减小,折
5.C由图可知,点电荷Q产生的电场中,E。和E6指向点电荷,
射光线向下偏移,可能出现折射光线打在BC面被吸收
故点电荷Q带负电,A错误;由图中可知,a点到点电荷的
则不是所有光线都能经过三棱镜传播到光屏,C错误,
距离大于b点到点电荷的距离,根据库仑定律F=⑨,可
10.BD
2
根据右手定则,导体棒从右向左运动过程中,流过导体棒
知粒子g在a点的静电力小于在b点的静电力,B错误;根
的电流由M到V,流过二极管的电流由C到E,导体棒
受到安培力,若导体棒向左运动能到达原来的高度,则流
据上述分析可知,a点到点电荷的距离大于b点到点电荷的
距离,沿着电场线方向电势降低,根据负点电荷周围等势面
过导体棒的电荷量Q==R·t=尺,因二部分
R
的分布情况,可知a点的电势高于b点电势,结合粒子轨迹
能量转化为热能,因此到不了原来的高度,流过导体棒的
的弯曲方向,可知粒子q与点电荷Q的电性相反,因此粒子
q带正电,电势能的定义式E,=q9,可知粒子q在a点的电
电荷量小于BL,A错误:从左向右摆时回路无电流,
R
势能大于在b点的电势能,C正确,D错误.
6.B在近地停泊圆轨道和空间站轨道上运行时,根据开普勒第
导体棒不受安培力,机械能守恒,B正确;每次从右向左
摆时经过同一点速度更小,水平位移更小,安培力做功更
三定律可知二=二可知周期之比为T·T=
小,因此损失的机械能都更小,每次回到右边最高点的位
置都比上一次降低的高度要低,C错误:最终导体棒会静
√,A错误;从近地停泊圆轨道变轨至椭圆过渡轨道时,
止在最低点,减小的重力势能转化为内能,因此导体棒产
需在P点增大速度,做离心运动,B正确:根据GMm=a
2
生的热量为受,D正确。
可知,在近地停泊圆轨道P点的向心加速度等于在椭圆过
11.(1)乙(2分)
渡轨道P点向心加速度,C错误;在椭圆过渡轨道上由P点
(2)AB(2分)
向Q点运动过程中,万有引力做负功,动能减小,势能增加,
则机械能不变,D错误.
(3)2(n-1)(21+D22分)
2t
解析:(1)固定摆线时应该用夹子夹住摆线上端,防止摆长变
mUA一nBvB=0(1分)
化,即最好的悬挂方式是图2中的乙,(2)小球需选用密度大
解得B=8m/s(1分)
体积小的钢球,以减小阻力的影响,A正确:需测出小球完成
弹簧储存的弹性势能等于弹开后A、B的总动能
几十次全振动的总时间,再求出单摆的周期,这样可减小误
差,B正确:小球摆动的幅度不能超过5°,否则就不是简谐振
E,=号m+之mm21分)
动,C错误;测摆长时应将小球悬挂,然后进行测量,D错误
弹簧储存的弹性势能E。=24J(1分)
AB正确.(3)单摆的周期T=t,
(3)B滑上传送带后,受向左的滑动摩擦力,加速度大小
n-1
=名旅据T-
a=g=2m/s2,方向向左:(1分)
当B减速到零时,由%2=2ax(1分)
B向右减速到零的位移x=16m<L=18m(1分)
2I
g
,可得g=元(n-1)(21+D)
2t2
、B向左加速到与传送带共速=2m/s时的位移=多
12.(1)50.20(1分)4.700(1分)
22
(2)C(1分)D(1分)F(1分)
=2×2=1m<16m1分)
V
说明共速后B匀速向左离开传送带,最终速度大小为=
2m/s(1分)
A
方向向左.(1分)
(3)
(2分)
15.(1)从O点射出的粒子在板间被加速,
R
则U,g=md-2mm2(1分)
粒子在磁场中做匀速圆周运动,
(4)2.60(1分)0.52(1分)
(5)R
半径-台1分)
(1分)
由洛伦兹力提供向心力,有gB=m立(1分)
解析:(1)根据游标卡尺读数规律可得,其长度为l=50mm十
4×0.05mm=50.20mm,根据螺旋测微器读数规律可得,金
解得U=
Bq2_m(1分)
属丝的直径为d=4.5mm+20.0×0.01mm=4.700mm.(2)
8
2g
电源电动势为3V,则电压表需要选择D:电路最大电流约为I
(2)当电压有最小值时,粒子穿过下方的正极板后,圆轨迹与
E
3
挡板OM相切,此时粒子恰好不能打到挡板上,如图所示
=R千,十A=0.5A电流表应选择C:为方便实验操作,
为了减小误差,需要电压从零开始变化,滑动变阻器采用分压
式连接,故滑动变阻器选择阻值较小的F,(3)由于待测电阻的
阻值远小于电压表的电阻,但电流表内阻已知,故选择电流表
c
内接法,滑动变阻器采用分压接法,如答案图所示.(4)电压表的
分度值为0,1V,则电压表的读数为2.60V;电流表的分度值为
0371
0.02A,则电流表读数为0.52A.(5)根据电阻定律R=pS,
。。。。。。
其中S=π(号),该金属丝电阻率的表达式为=
4l·
从O点射出的粒子在板间被加速,
13.(1)机器人B在t2=10s时追上机器人A,有
w+06:=分a:-6户1分)
则U.g=子m时-之mw(1分)
粒子在负极板上方的磁场中做匀速圆周运动
机器人B的加速度大小aB=2.5m/s2(1分)
(2)在机器人B追上A之前,速度相等时两者之间有最大距
B=m文(1分)
min
离,设t时刻速度相等,
粒子从负极板运动到正极板时速度仍减小到。,
有u0+aAt=aB(t-t1)(1分)
解得t=6s(1分)
则gwB=m(1分)
两者之间的最大距离
1
由儿何关系可知2m=sn37+r(1分)
△x=wt+2an红-2aB(t-i)'=16m1分)
其中u=4(1分)
(3)跑道长100米,机器人A以vA=4m/s的速度从起点匀速
3
向终点出发,机器人B以=8m/s的速度从终点匀速向
起点出发,
联立解得U=之1分》
第一次相适时间4-。-智1分
(3)粒子打在P点,由洛伦兹力提供向心力,
有gB=m(1分)
之后每次相遇,两者的路程和为200m,时间间隔△t=
r
200=50
h十=3s(1分)
其中=号
设相遇次数为,总时间满足罗+(m-1D×0<10(1分)
联立解得=BL(1分)
21m
解得n≤6.5,100秒内机器人A与B会相遇6次.(1分)
对单个粒子,由动量定理,有I单=v一0(1分)
14.(1)A脱离弹簧后做平抛运动,竖直方向自由下落
设△t时间内有n个粒子打在靶上的P点,
h=2g1分)
则有F△t=nl单(1分)
等效电流为1=型=9(1分)
水平方向匀速运动s=Ut(1分)
△t△t
物块A脱离弹簧时速度的大小=4m/s(1分)
联立解得瓷(1分
(2)弹簧弹开过程,水平面光滑,A、B系统动量守恒,有
2
资源预览图

1

2

3
4
相关资源
由于学科网是一个信息分享及获取的平台,不确保部分用户上传资料的 来源及知识产权归属。如您发现相关资料侵犯您的合法权益,请联系学科网,我们核实后将及时进行处理。